Lab 5: Interrupts
Introduction
In this lab I used C code in order to determine the velocity of a motor. Specifically I used interrupts in order to record the velocity at a sampling frequency of 1Hz.
Technical Documentation
The source code for this project can be found in this github repository.
Schematic
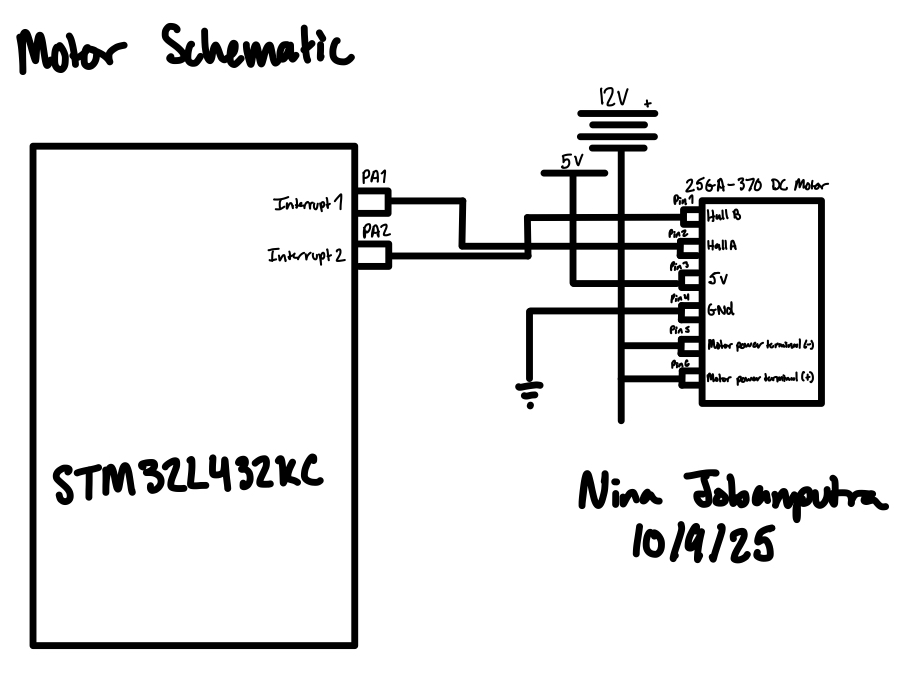
Figure 1 shows which pins were connected to the motor.
Flow Chart
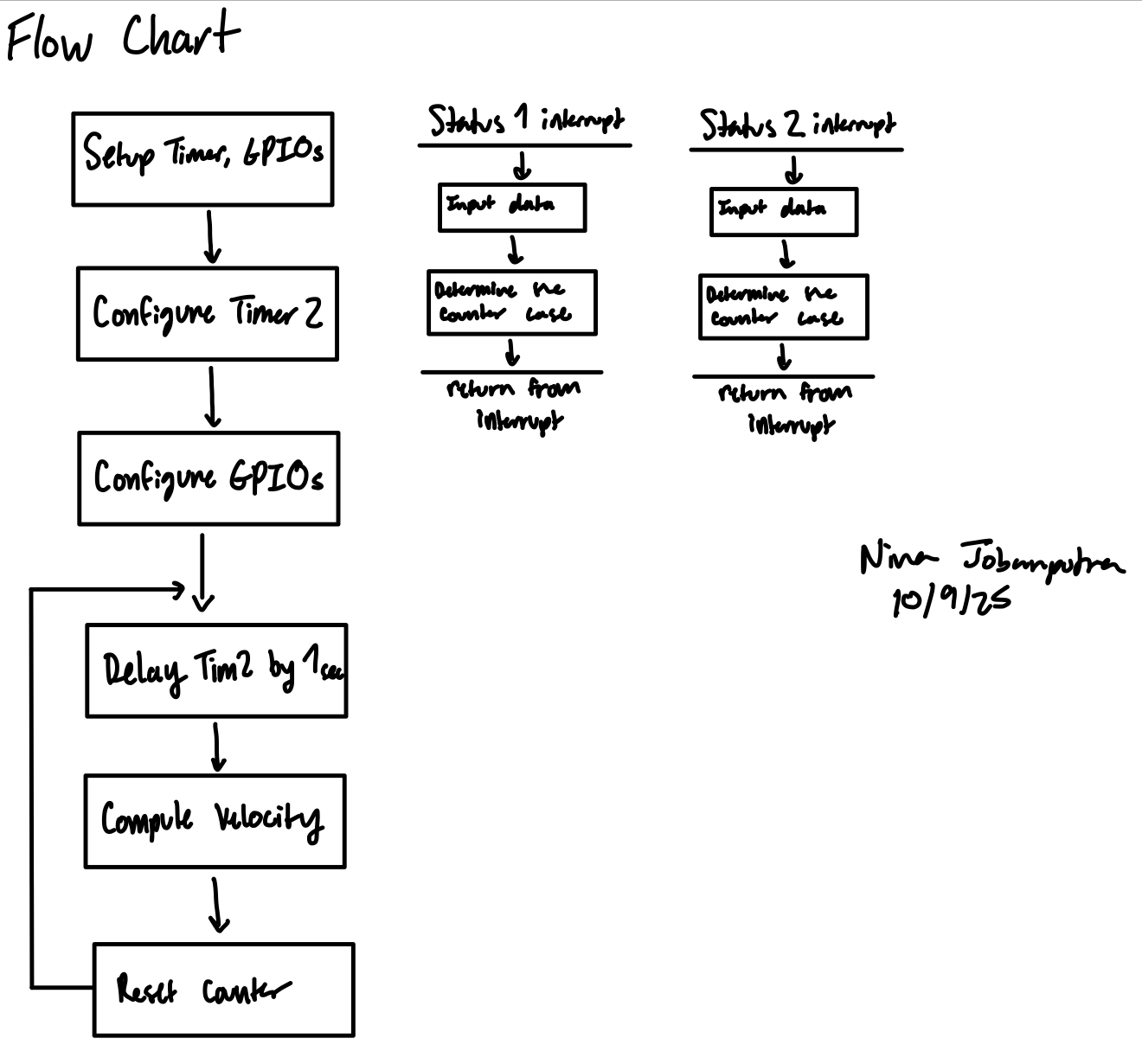
Figure 2 shows the path the code takes.
Results and Discussion
I validated the velocity I got from my program by both counting it and taking an oscilliscope trace and doing some math. I set my motor to about 11.33V and my program showed a velocity of about 2.72 revs/second. I started a timer for about 15 seconds and counted the amount of revolutions I saw. Then I scaled that number down for 1 second which is the velocity my program was outputting. I ended up getting a velocity of about 2.667 revs/second. For the math way I started by taking an oscilscope trace.
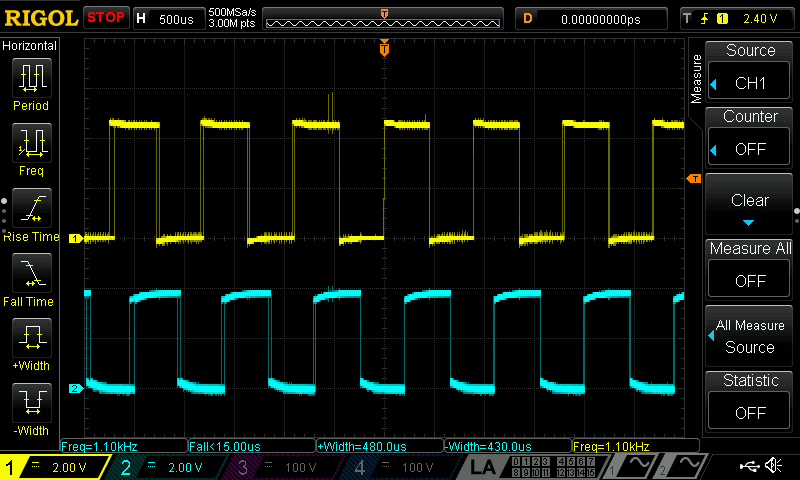
Figure 3 shows the interrupt signals.
From the oscilloscope I measured that the frequency was 1.1KHz. Below shows my math to validte the speed through manual hand calculations.
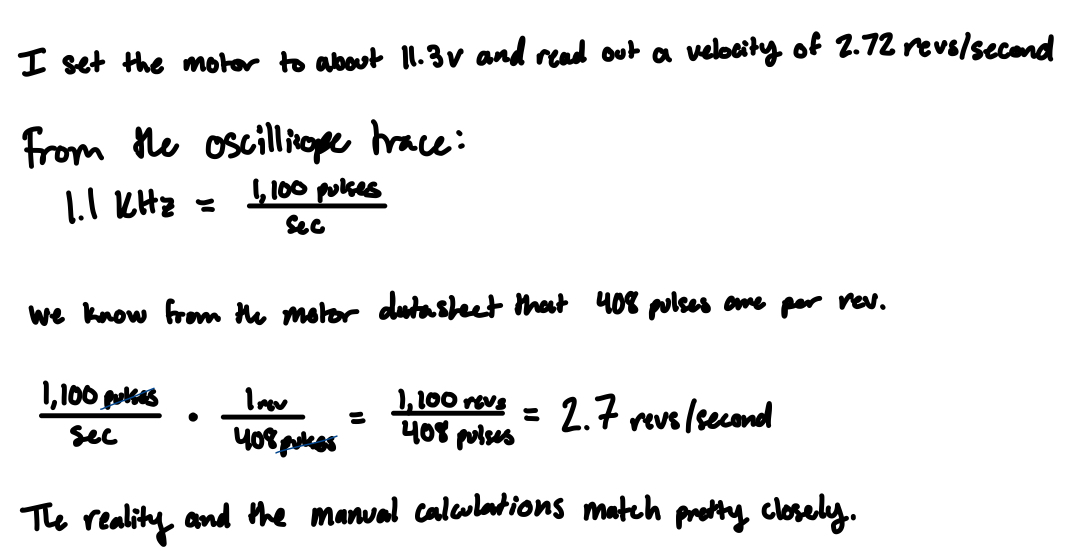
Figure 4 shows the math used to validate the velocity.
Polling Vs. Interrupts
Polling is when a device is constantly checking the status of our device, so in our case it has to continually check for when it should be computing the velocity. So it is constantly it is continually sending requests to know if it is time to do something. Interrupts basically only go up and alert the program when it absolutely has to do something, otherwise it idles and does nothing. Since polling is constantly checking this results in higher latency and using up a lot more reasources. However, coding for polling is way easier to implment than the interrupts. Interrupts on the otherhand, while difficult to code are much faster and use up less reasources. In this lab, since we have to update the velocity every second, which is a short time frame but would be hard to do with polling because there would be a delay since with polling we are constantly checking when we need to do something and then we finally get the answer to do the thing, we would already be behind the interrupts.

Figure 5 shows the oscilloscope trace that shows that my polling frequency is at 965Hz compared to my interupt frequency at double that.
Here we see that the polling sampling frequency is much slower than the interrupt sampling frequency.
In all this lab successfully worked, it was able to tell the velocity somewhat accurately and provide the correct direction. I worked on the lab for about 10 hours, and an additonal 4 for write up and calculations.
AI prototype
Continuing my adventures with Claude, I gave it the prompt and this is the code it gave back.
/* Quadrature Encoder Interface for STM32L432KC
* Uses TIM2 in encoder mode with PA0 (CH1) and PA1 (CH2)
* Hardware handles quadrature decoding automatically
*/
#include "stm32l4xx_hal.h"
TIM_HandleTypeDef htim2;
volatile int32_t encoder_position = 0;
volatile int32_t encoder_velocity = 0;
volatile uint32_t last_count = 0;
/* Initialize TIM2 in encoder mode */
void Encoder_Init(void)
{
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* Enable clocks */
__HAL_RCC_TIM2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/* Configure GPIO pins PA0 and PA1 for TIM2_CH1 and TIM2_CH2 */
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP; // Use pullup for encoder signals
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* Configure TIM2 in encoder mode */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 0xFFFFFFFF; // 32-bit timer max value
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
/* Encoder mode configuration - count on both edges of both channels */
sConfig.EncoderMode = TIM_ENCODERMODE_TI12;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 10; // Input filter to debounce
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 10; // Input filter to debounce
if (HAL_TIM_Encoder_Init(&htim2, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* Set counter to middle position for bidirectional counting */
__HAL_TIM_SET_COUNTER(&htim2, 0x80000000);
last_count = 0x80000000;
/* Start encoder interface */
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
/* Optional: Enable update interrupt for overflow detection */
__HAL_TIM_ENABLE_IT(&htim2, TIM_IT_UPDATE);
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
/* Get current encoder position (relative to initialization) */
int32_t Encoder_GetPosition(void)
{
uint32_t current_count = __HAL_TIM_GET_COUNTER(&htim2);
encoder_position = (int32_t)(current_count - 0x80000000);
return encoder_position;
}
/* Reset encoder position to zero */
void Encoder_Reset(void)
{
__HAL_TIM_SET_COUNTER(&htim2, 0x80000000);
last_count = 0x80000000;
encoder_position = 0;
}
/* Get encoder direction: 1 = forward, -1 = backward, 0 = stopped */
int8_t Encoder_GetDirection(void)
{
if (__HAL_TIM_IS_TIM_COUNTING_DOWN(&htim2))
return -1;
else if (__HAL_TIM_IS_TIM_COUNTING_UP(&htim2))
return 1;
return 0;
}
/* Calculate velocity (call this periodically, e.g., every 10ms) */
int32_t Encoder_GetVelocity(void)
{
uint32_t current_count = __HAL_TIM_GET_COUNTER(&htim2);
int32_t delta = (int32_t)(current_count - last_count);
last_count = current_count;
encoder_velocity = delta;
return encoder_velocity;
}
/* TIM2 Update interrupt handler - detects overflow/underflow */
void TIM2_IRQHandler(void)
{
if (__HAL_TIM_GET_FLAG(&htim2, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(&htim2, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(&htim2, TIM_IT_UPDATE);
/* Handle overflow/underflow if needed */
// With 32-bit counter, overflow is rare in practice
}
}
}
/* Optional: External interrupt approach for index pulse (Z channel)
* Connect index pulse to PA10 (can use any GPIO with EXTI)
*/
void Encoder_Index_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
/* Index pulse interrupt handler */
void EXTI15_10_IRQHandler(void)
{
if (__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_10) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_10);
/* Reset position on index pulse */
Encoder_Reset();
}
}
/* Example usage in main.c */
void Example_Usage(void)
{
int32_t position, velocity;
int8_t direction;
/* Initialize encoder */
Encoder_Init();
/* Optional: Initialize index pulse */
// Encoder_Index_Init();
while(1)
{
/* Read position (counts) */
position = Encoder_GetPosition();
/* Read direction */
direction = Encoder_GetDirection();
/* Calculate velocity (call at fixed intervals) */
velocity = Encoder_GetVelocity();
/* Your application code here */
HAL_Delay(10); // 10ms sample period for velocity
}
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}Looking at this code it seems a little bit more complex than my solution. It doesn’t appear to be using some of the libraries we had access to. I did try and run this code but I got some errors, mainly with these libraries and things not being exactly correct. Over the past couple of prototypes I have found that AI has been better at C coding than SystemVerilog. I think this is because C is an actual coding language and it has debuggers while SystemVerilog is incredibly niche and is more of a translation of hardware.